

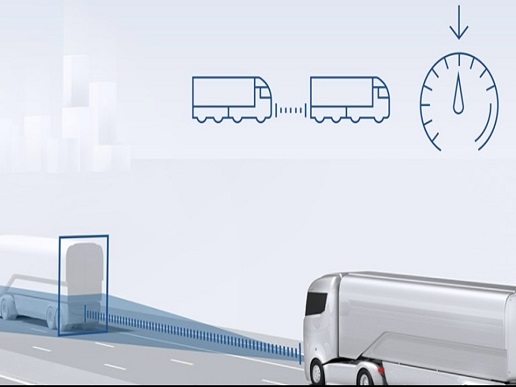
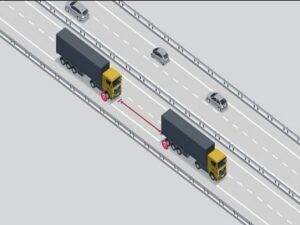
در کشنده های داف یورو ۶ سیستم کروز تطبیقی (ACC) یا Adaptive cruise control وجود دارد. این سیستم همانطور که از نامش بر می آید بر پایه ی تطبیق فاصله ی کشنده با ماشین های جلویی موجود در جاده می باشد. در جلوی هر کشنده یورو۶ یک سنسور راداری وجود دارد که با ارسال سیگنال به ماشین جلویی و سنجش فاصله از ماشین جلویی سرعت ماشین را کنترل می کند بدین معنا که کشنده هر لحظه سعی می کند با تنظیم سرعت خود فاصله را از ماشین جلویی حفظ نماید. این سیستم ACC مبتنی بر عملکرد سنسور راداری(Radar Sensor) می باشدکه می بایست جلوی این سنسور ها دائم تمیز و سالم باشد. در مقابل یک سیستم جدید دیگر نیز وجود دارد که PCC یا کروز قابل پیش بینی(predictive cruise (control نامیده می شود که اساس کار آن بر پایه ی سیگنال gps و نقشه الکترونیکی می باشد که توپوگرافی و جغرافیایی محیط و جاده را درک می کند و سرعت را بر اساس شیب جاده و پیچ و خم و سربالا سرازیری جاده می سنجد در مواردی که گیربکس اتومات روی کشنده سوار است این سیستم PCC روی عملکرد تعویض دنده و نیز عملگر Ecoroll اثر می گذارد تمامی این موارد و فرآیند باعث کاهش مصرف سوخت می گردد.